Rosie
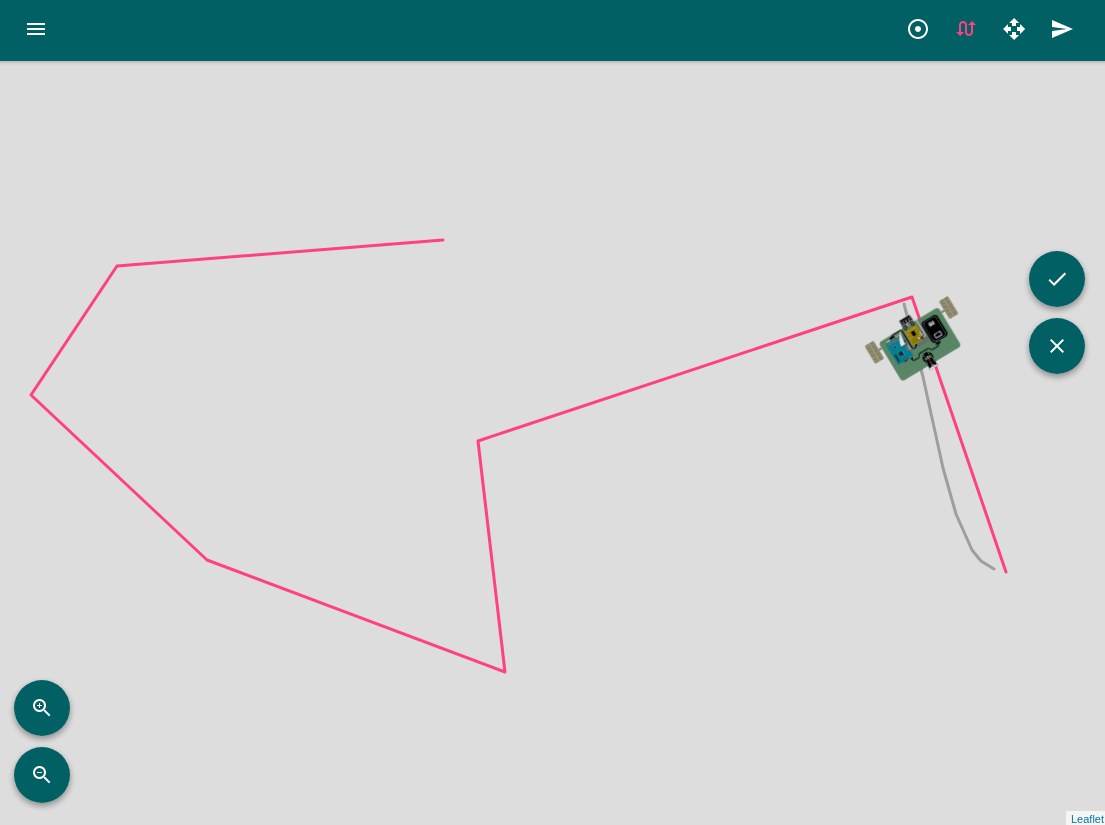
A Python library to control mobile robots. It features implementations of Path Planning, Control of Trajectory and Telemetry all built from scratch. It is also available a web-based graphical interface to manage the robots running rosie.
A Python library to control mobile robots. It features implementations of Path Planning, Control of Trajectory and Telemetry all built from scratch. It is also available a web-based graphical interface to manage the robots running rosie.