LTL
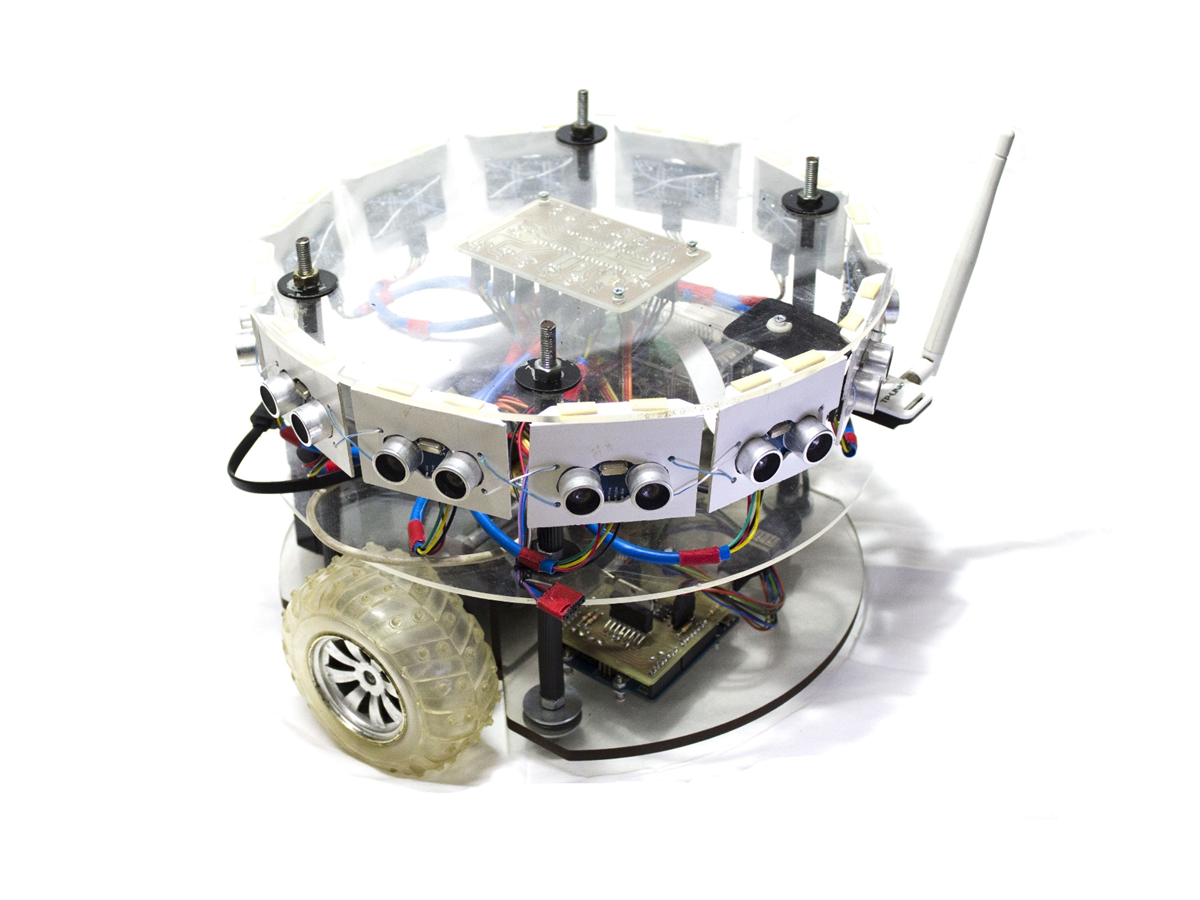
An autonomous robot to test computer vision applications designed as part of my engineering thesis. It was further extended by a group of students under my supervision, to carry on tasks of indoor localization and tracking of moving objects. It was also used for investigating the motion of biological walkers.
Project information
- Category: Robotics, IoT
- Project date: 2014-2019
- Related Publications:
The team:


